
| 加速度计 | 参数范围 | 备注 |
| 量程:X,Y,Z | ±2g~+200g | 可选配,g=9.7964m/s^2 |
| 零偏不稳定性 | <20μg | @Allan 方差,10h 静止采集 |
| 零偏稳定性 | <70μg | @国军标 10s 平滑,30min静止采集 |
| 交轴耦合误差(非正交) | <0.09% | |
| 全温零偏 | <5mg | -40~85℃,<=1℃> |
| 全温刻度系数误差 | <0.1% | -40~85℃,<=1℃> |
| 分辨率 | 0.2mg | |
| 随机游走 | <0.05m> |
| 陀螺仪 | 参数范围 | 备注 |
| 量程:X,Y,Z | ±100~±4000°/s | 可选配 |
| 零偏不稳定性(Allan 方差) | 0.5 ~1.8°/h | @Allan 方差,10h 静止采集 |
| 零偏稳定性(10s 平滑) | 1 ~10°/h | @国军标 10s 平滑,30min静止采集 |
| 交轴耦合误差(非正交) | 0.02~0.2° | |
| 全温零偏稳定性 | ±1 °/h | |
| 全温刻度系数误差 | ±1.5%~1% | |
| 分辨率 | <0.015°> | |
| 非线性 | <200ppm | |
| 随机游走 | 0.15º/√hr |
| 环境要求 | 参数范围 | 备注 |
| 工作温度 | -40~+85℃ | |
| 储存温度 | -55~+100℃ | |
| 外壳材质 | 铝 |
| 电气特性 | 参数范围 | 备注 |
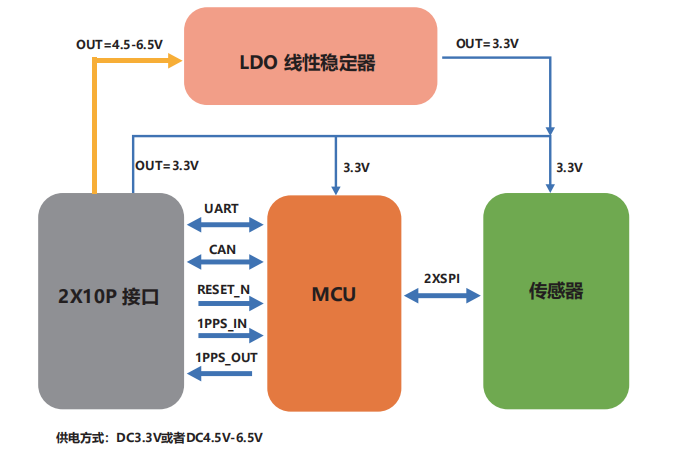
| 输入电压 | DC3~5V | |
| 功耗 | <0.2w | |
| 通讯接口 | SPI/UART(可选) | |
| 输出 | RS422 接口输出 |
| 物理特性 | 参数范围 | 备注 |
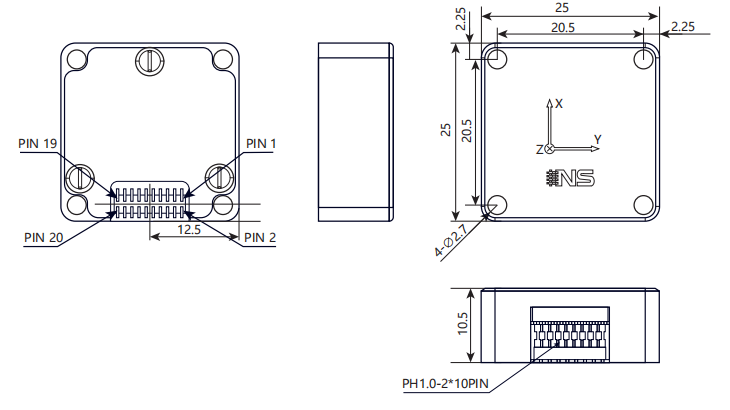
| 尺寸 | 25x25x10.5mm^3 | |
| 重量 | <15g<> | |
| 连接端子 | 10×2 排针,Pitch1.0 |



 商业航天/航空
商业航天/航空 
 低空经济
低空经济